
虎嗅注:本文是 Google 無人駕駛項目總監 Chris Urmson 發表在 Medium 的文章,由虎嗅編譯。
作者按:170 萬英里的行程,讓我們瞭解了許多關於無人駕駛系統的事情,當然,還有人類是如何開車的。
美國境內每年有 33000 人死於交通事故,這就是為什麼有許多無人駕駛汽車的熱情支持者將精力專注在降低事故發生率上面。我們距離實現完全無人駕駛汽車的願景越來越近,只需要一個按鈕操作,未來的無人駕駛汽車可以將任何人從 A 點送到 B 點,與此同時,我們也在思考如何評估研發的進展,以及對道路安全的影響。
為了能夠判斷汽車駕駛的安全係數,我們需要弄清楚的最重要的事情之一就是典型城郊街道條件下的“基準” (baseline) 事故情況。簡單來説就是,因為許多事故從未被計入官方統計,我們要搞清在預期情況下無人駕駛汽車被其他汽車撞到的頻率。甚至是當我們的軟件和感應器能夠探測到可能發生事故並在對方司機之前更快採取行動的條件下,有時候我們仍舊無法克服行駛速度和車輛距離的因素,而有時候我們僅僅是在等待交通燈都會被撞到。這些都是無人駕駛汽車在一些社區行駛時的重要場景,儘管我們希望能夠避免所有的事故,但一些事故是無法避免的。
汽車駕駛中最常見的交通事故,也就是通常白天在街道行使中會遇到的——小擦碰,沒人受傷——並沒有被很好的分析,因為這些事故並不會彙報給警察。但是美國高速公路交通安全管理局 (National Highway Traffic Safety Administration) 的數據顯示,這些事故佔全部車輛事故的 55%。除非你能夠每天堅持一英里一英里的駕駛,否則很難了解路面上真正發生了什麼情況。而我們的車隊一直就在做這件事,20 多輛無人駕駛汽車和安全駕駛員團隊,已經累計行駛了 170 萬英里 (人工駕駛和無人駕駛都有)。無人駕駛條件下的行駛已經佔到了這其中的近 100 萬英里,我們現在每週的無人駕駛平均里程數維持在一萬英里左右 (比一個典型的美國司機一年的行駛里程數稍微少點),大部分路況都是城市街道。
為了讓我們所有人都成為更安全的駕駛者,我們希望分享一些觀察到的事故模式。其中很多都不是另人意外的情況,尤其是考慮到我們都知道司機操作失誤導致 94% 的交通事故這一點。
如果你在道路上行駛足夠多時間的話,事故無論如何都會發生,無論你是在普通汽車還是無人駕駛汽車當中。自從 Google 無人駕駛項目開始起的過去六年裏,我們在長達 170 萬英里的無人駕駛和人工駕駛中,總共出了 11 起小事故 (小擦碰,無人受傷),在這過程中我們團隊的安全駕駛員始終在方向盤後面,且沒有一次是自動駕駛功能導致事故的發生。
追尾 (rear-end crashes) 是美國發生最頻繁的交通事故,經常是前車司機沒有任何辦法避免被撞情況的發生;我們被其他車從後面撞了七次,主要是在等交通燈的時候,也有在封閉公路正常行駛的時候。我們也遇到了幾次側面擦碰 (side-swiped) 的情況,還有一次被闖紅燈的車撞到。正如你可能預料到的,我們在街道路況下的每英里事故數要高於封閉公路的路況。我們在路面上的所有瘋狂經歷對於無人駕駛研究項目都非常有價值。我們有一個詳細的評估流程,並盡力從每一次事故中獲取一些東西,即使事故的發生並非由我們的過錯導致。
我們不僅在瞭解城郊街道小事故發生率的問題,同樣在判斷駕駛員操作的模式,比如偏道 (lane-drifting) 和闖紅燈 (red-light running) 這些導致重大事故的主要原因。這些操作習慣甚至不會在官方統計中出現,但是卻給所有人制造了一個危險的局面。
目前道路駕駛中的問題
許多人並不注意路面情況。在美國任何一個白天的時刻,就有 66 萬坐在方向盤後的人在查看他們的移動設備,而不是注意路面的情況。我們的安全駕駛員經常會看到其他車在車道上晃來晃去;我們還見到過一邊開車一邊看書的人,甚至還有吹小喇叭的情況。無人駕駛汽車在這一點上無疑要比人類更安全。前者擁有 360 度視野外加 100% 的全時全方向探測;我們最新的傳感器能夠追蹤其他汽車、自行車和行人,範圍遠至兩個足球場的距離。
交道路口會是很恐怖的地段。在過去幾年裏,美國道路環境中 21% 的死傷事故和 50% 的重傷事故都與交道路口有關。受傷的通常是行人和被撞車輛的司機,而不是闖紅燈的肇事司機。這也是為什麼我們將車輛設置為在交通燈變綠之後先保持一段駐車狀態,之後再駛過路口的原因——通常這個時候有些司機會或不耐煩或不專心地加速駛入路口。
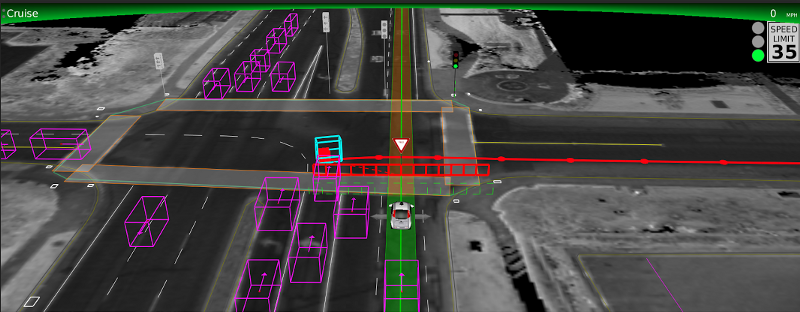
在這個案例當中,一輛自行車 (淺藍色方塊標註) 在通過道路交口的時候較晚,差一點被向左轉向的一輛汽車 (進入路口的紫色方塊標註) 撞到,後者並沒有注意到自行車,並在交通燈變綠後啟動行駛。我們的無人駕駛汽車預判到了自行車的操作 (紅色路線標註),並沒有立刻行駛,而是直到自行車安全駛過路口後才啟動。
轉彎可能會帶來麻煩。我們觀察到很多司機轉彎之後繼續行駛在錯誤車道上的情況,尤其是在夜間,司機在道路中錯線行駛 (overshoot or undershoot the median) 的情況很普遍。

在這張圖中你可以看到,不僅是一輛,而是兩輛汽車 (在綠色路線左側的兩個紫色方塊,正是你在圖片上看到的汽車) 正在錯誤的車道上向我們駛來;這個情況發生在山景城夜晚 (Mountain View) 最繁忙的一條道路上。
有時候,司機在意識到他們將會錯過轉彎路口的時候,會做非常愚蠢的事情。
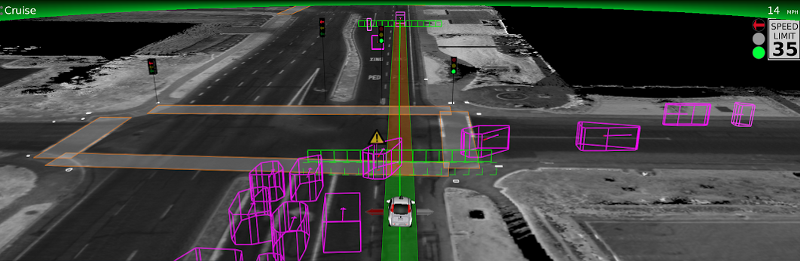
一輛汽車 (壓在綠色條狀路線上的紫色方塊,上面有一個歎號標註) 決定從我們左側的車道向右轉,直接穿過我們的路線。綠色的條狀路線,我們稱之為“籬笆”(fence),顯示我們的汽車會減速,避免與這輛瘋狂轉向的汽車相撞。
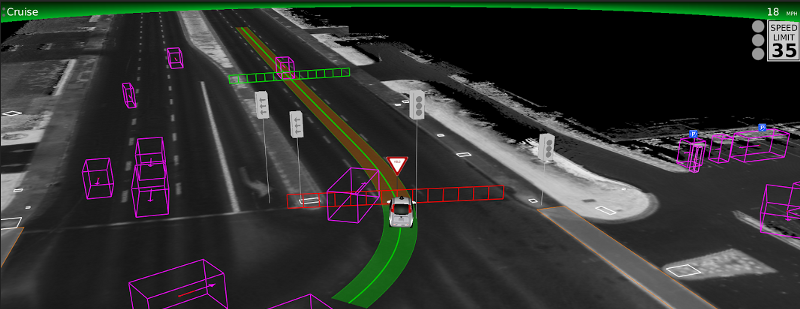
有些時候,一些司機開起車來就好像我們沒在那裏一樣。在下面一幅圖中,左側的一輛車 (穿過紅色“籬笆”的紫色方塊標註) 突然衝向我們的車道。在這個例子當中,紅色“籬笆”顯示的是我們的汽車停止並做出避讓。
這些駕駛經歷 (還有數不清的其他例子) 讓我們更深地認識到了當下道路駕駛面臨的問題挑戰。我們會繼續行駛數千英里,這樣我們就能更好地瞭解問題,那些常見的導致許多日常行駛事故的操作現象——我們也會繼續努力開發自動駕駛汽車,讓後者為人類解決這個問題挑戰。
資料來源:虎嗅網


請按此登錄後留言。未成為會員? 立即註冊