談起仿生學,我們並不陌生,模仿生物的構造和功能而發明的新工具在人類歷史上比比皆是。最近科學家們又從蛇身上得到啟發,打造出能滑行前進並越過障礙物的蛇行機器人。
美國約翰·霍普金斯大學的工程師們研究了蛇的活動機制,將原理應用到了可靈活行動的機器人上,寄希望於這種機器人在搜索和救援中大展拳腳。
「我們從這些令人毛骨悚然的生物上尋找靈感,因為它們在日常生活中早已能自如地越過障礙,」研究人員之一 Chen Li 表示,「希望我們的機器人能夠學習如何像蛇一樣滑行。」
以攀爬不同高度和表面的台階為例,研究人員注意到蛇的身體採用了側身起伏與懸臂狀相結合的形態,身體分為三部分行動,前後段來回移動,中間部分則保持不動。
靠近台階時,前段長度增加,中間段長度不變,後段長段縮短。對於較高的台階或表面光滑的台階,蛇的速度和搖擺幅度都會降低,以保持攀爬的穩定性。
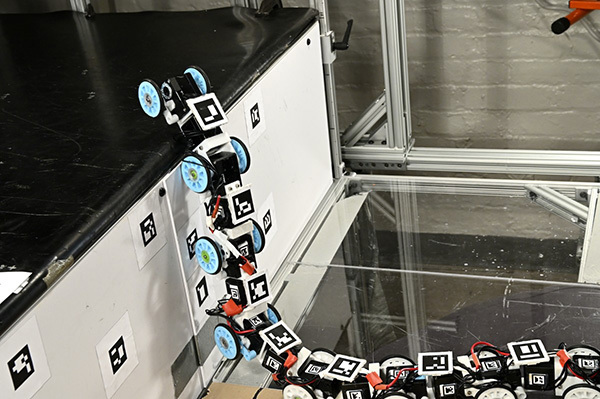
工程最早根據蛇的行為模式建行出的是帶有一個十段輪式履帶的機器人,但初代結構穩定性不足,經常翻車或被卡住,後來工程師通過在每個單向輪與機身各部位之間插入懸停裝置減少其滾動的不穩定性。
如今這種蛇形機器人已經能爬上相當於體長 38% 高度的表面,且速度幾乎與蛇一致。不過,由於增加了懸停裝置,能耗也隨之增加,且目前能量轉化率較差,降低能耗和讓機器人在更復雜的表面活動是接下來研究工作的重點。
題圖及文中配圖均來自:newatlas
資料來源:愛範兒(ifanr)
美國約翰·霍普金斯大學的工程師們研究了蛇的活動機制,將原理應用到了可靈活行動的機器人上,寄希望於這種機器人在搜索和救援中大展拳腳。

「我們從這些令人毛骨悚然的生物上尋找靈感,因為它們在日常生活中早已能自如地越過障礙,」研究人員之一 Chen Li 表示,「希望我們的機器人能夠學習如何像蛇一樣滑行。」
以攀爬不同高度和表面的台階為例,研究人員注意到蛇的身體採用了側身起伏與懸臂狀相結合的形態,身體分為三部分行動,前後段來回移動,中間部分則保持不動。
靠近台階時,前段長度增加,中間段長度不變,後段長段縮短。對於較高的台階或表面光滑的台階,蛇的速度和搖擺幅度都會降低,以保持攀爬的穩定性。
工程最早根據蛇的行為模式建行出的是帶有一個十段輪式履帶的機器人,但初代結構穩定性不足,經常翻車或被卡住,後來工程師通過在每個單向輪與機身各部位之間插入懸停裝置減少其滾動的不穩定性。
如今這種蛇形機器人已經能爬上相當於體長 38% 高度的表面,且速度幾乎與蛇一致。不過,由於增加了懸停裝置,能耗也隨之增加,且目前能量轉化率較差,降低能耗和讓機器人在更復雜的表面活動是接下來研究工作的重點。
題圖及文中配圖均來自:newatlas
資料來源:愛範兒(ifanr)


請按此登錄後留言。未成為會員? 立即註冊