不久前,機器人馬拉松的翻車名場面還記憶猶新,而剛剛,杭州也順利舉行了全球首個人形機器人格鬥比賽,上演了一場現實版《鐵甲鋼拳》。
這次的主角不是休·傑克曼,而是一羣全副武裝的人形機器人,打拳、閃避、貼身肉搏,對抗節奏一個比一個狠,妥妥的機器人互毆現場。
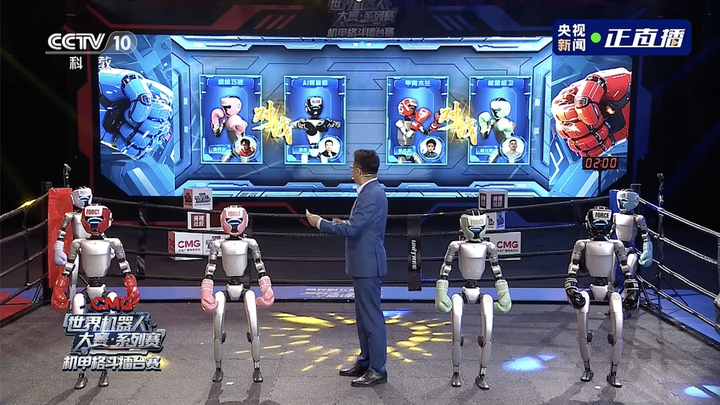
整場格鬥賽分兩部分:表演賽和競技賽。前者主要秀動作,熱熱身,而真正的重頭戲,還得看後面的競技賽,各種單打、纏鬥動作輪番上演。
▲ 素材來自央視新聞,下同
開局是表演賽,小粉和小綠率先登場。
開場雙方互相試探,注意看,擂台角落甚至還有機器人觀眾在「打call」。
突然,小綠一個衝拳命中,小粉被擊倒在地,不過很快爬了起來。緊接着,又被擂台邊的繩子絆倒。
比較遺憾的是,導播在關鍵時刻切了鏡頭,錯過了機器人版「鯉魚打挺」。接着便是正賽,而在正式開始之前,先簡單説下比賽規則。
競技賽採用標準的三回合賽制,每回合兩分鐘。擊中頭部或軀幹算有效擊打,倒地要扣分,若倒地後無法在規定時間內起身,則判負。
三輪結束後,累計得分最高者獲勝。
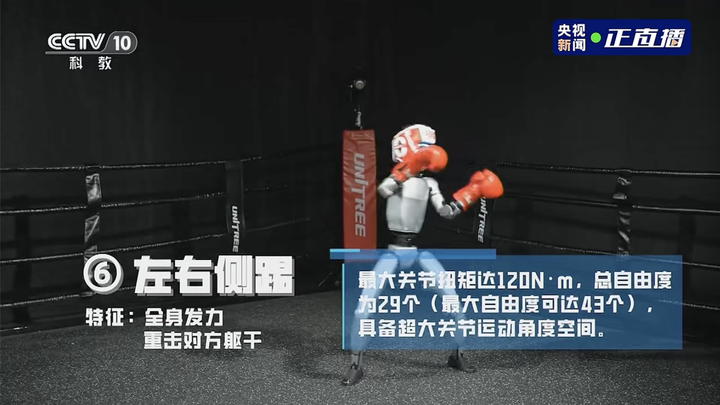
別看是機器人,但它們的招式一點也不含糊:直拳、勾拳、掃腿、側踢……整整十種動作組合,打起來有板有眼。而為了便於理解,我們今天就用顏色代稱這些機器人選手。
打得像人、摔得更像人,這場機器人擂台賽有點東西
第一場:小黑 VS 小粉
首場登場的是小黑和小粉,正式展開較量。
雙方人類操作員唸完狠話,握手示意,接着一聲令下,兩台機器人瞬間啓動,開局互踹,戰意拉滿,但打着打着也有些「迷路」。
第一回合,小黑直接被幹翻在地,小粉見狀不但沒追擊,反手就是一套標準挑釁動作,屬實是殺人誅心。
第二回合,小粉繼續加強攻勢,小黑則顯得冷靜許多,試圖找機會趁機一腳帶走對手。雙方不斷試探彼此破綻,但局勢膠着,場面略顯焦灼。
第三回合,小黑一腳將小粉踢翻。但轉眼間,小黑自己也被絆倒,雙方雙雙倒地。幸運的是,小黑最終率先站起。
我宣佈「黑隊被 KO,本場比賽的結果是粉方獲勝。」
等等,不好意思,解説口誤,誤判小粉勝利,實際獲勝的是小黑。小插曲一波,後面解説也更正了這個比賽結果。
第二場:小綠 VS 小紅
第二組對決,輪到小綠對陣小紅。
第一回合期間,借鑑前面的比賽策略,開場雙方不再客氣,一上來就直接腿踢互相問候。只是這一回合,小綠操作失誤摔了個狗啃泥,直接被扣分。
進入第二回合,小綠徹底上頭,切換到狂暴模式,不僅對空氣打出一套組合拳,順帶還附送了一個挑釁動作,囂張值直接拉滿。
小紅見狀,表示孰可忍孰不可忍。
第三回合,小紅本打算反擊一波「教做人」,但第三回合剛起勢,一腳飛踢卻踢了個寂寞,直接原地躺平,比賽就此結束。
最終,小綠拿下這一局勝利。
決賽:小黑 VS 小綠(終極對決)
終於到了決賽時間,頂流對決:小黑對上小綠。
決賽開始前,官方還特地展示了它們的終極技能——颶風衝撞,不過比較可惜,這場比賽中並未上演這招,可能還需繼續打磨。
第一回合,雙方默契選擇膝踢開場,一上來就纏鬥成一團,裁判多次介入分開。小綠小綠雖摔了一次,但並未受太大影響。
第二回合節奏更快,小黑腿法密集、出招狠毒,小綠也不是吃素的,頻頻用拳還擊,但由於接連倒地兩次,整體情況不太樂觀。
來到終局之戰,第三回合。
小黑穩紮穩打,一記有力的側踢再次將小綠踢翻在地,而這已經是小綠在本場比賽中的第三次倒地,根據規則,勝負幾乎沒有懸念。
最終獲勝的,是小黑(AI 策算師)!
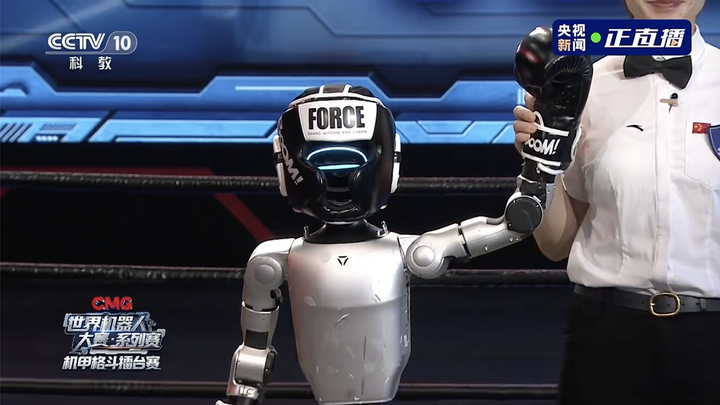
鏡頭拉近,小黑的機身佈滿擦痕和撞擊痕跡,也足以説明這場鏖戰的激烈程度,最後也讓我們把掌聲送給這位機器人選手。
打拳,是機器人上崗前的一場熱身
內行看門道,外行看熱鬧——這是這場機器人格鬥比賽中,解説重複最多的一句話。聽起來像是調侃,其實背後是門檻極高的技術考驗。
在拳擊場上,「站得住」是機器人最基本的尊嚴。
比起走路、跳舞,格鬥場景對結構穩定性和抗衝擊性提出了近乎嚴苛的要求,它不僅要求機體結構足夠剛硬、重心穩定,還要在短時間內完成高強度對抗動作。
一場像樣的機器人格鬥,要過四道關:
1. 機體設計:穩定性、抗打擊能力、動力系統等
2. 動作控制:步伐調整、手臂揮拳的準確度與連貫性
3. 感知系統:對環境變化(對手動作)的快速響應
4. 實時操控與延遲控制:目前仍靠人操作,意味着操作系統與人的配合也很關鍵
宇樹科技在接受媒體採訪時透露,他們為機器人格鬥動作採集了大量專業選手的數據,訓練素材直接來自職業搏擊選手的實戰演練。「它的老師就是一些職業的搏擊選手」
可以説,每一個揮拳的動作背後,都藏着職業選手的經驗數據。
這就不得不提一個認知誤區,我們早已習慣讓大模型寫代碼、畫畫、講笑話,於是理所當然地以為,機器人也應該能刷鍋、疊衣、喂貓。
但機器人不同於語言模型。語言模型可以從上萬億字的互聯網文本中自學成才,可對機器人來説,現實世界的數據收集成本是「級別不同」的事。
想教一個機器人炒雞蛋?你得先搭一個真實廚房,再裝一條能掄鍋鏟的機械臂,還要部署一套可以記錄每一次失敗的高精度數據系統——這一切,還得在經歷上千萬次失敗之後才可能接近合格。
相比之下,格鬥本質上是一種高效、低成本、強反饋的動作學習方式。
背後邏輯也很簡單。在人形機器人還沒找到明確落地場景之前,打拳是最容易標準化、最容易「出片」的展示方式。操作可控、畫面震撼、還能刷屏社交媒體——直給、好看、能講故事。
投資人看了興奮,媒體拍了好剪輯,觀眾一看就懂:這機器人,能打。
哪怕只是秀肌肉,只要能「出圈」,就是好演出,至少現在的打拳機器人,已經比前幾年那個連走路都磕磕絆絆的版本,強得不是一星半點。
當然話也要説回來,現在的機器人格鬥,背後還都是人操作的,很難不讓人質疑人形機器人目前仍是一款披着 AI 外衣的大號玩具。
從秀肌肉到上崗,機器人還得過很多關:穿越混亂場景、應對突發變化、進行人機協作、提升自我規劃能力……
真正的拐點,還需要落在炒菜、喂貓、養老、送貨、看護,這些瑣碎又高頻的場景裏。而現在的格鬥,只是機器人上崗前最有看點的一場熱身而已。
資料來源:愛範兒(ifanr)
這次的主角不是休·傑克曼,而是一羣全副武裝的人形機器人,打拳、閃避、貼身肉搏,對抗節奏一個比一個狠,妥妥的機器人互毆現場。
整場格鬥賽分兩部分:表演賽和競技賽。前者主要秀動作,熱熱身,而真正的重頭戲,還得看後面的競技賽,各種單打、纏鬥動作輪番上演。
▲ 素材來自央視新聞,下同
開局是表演賽,小粉和小綠率先登場。
開場雙方互相試探,注意看,擂台角落甚至還有機器人觀眾在「打call」。
突然,小綠一個衝拳命中,小粉被擊倒在地,不過很快爬了起來。緊接着,又被擂台邊的繩子絆倒。

比較遺憾的是,導播在關鍵時刻切了鏡頭,錯過了機器人版「鯉魚打挺」。接着便是正賽,而在正式開始之前,先簡單説下比賽規則。
競技賽採用標準的三回合賽制,每回合兩分鐘。擊中頭部或軀幹算有效擊打,倒地要扣分,若倒地後無法在規定時間內起身,則判負。
三輪結束後,累計得分最高者獲勝。
別看是機器人,但它們的招式一點也不含糊:直拳、勾拳、掃腿、側踢……整整十種動作組合,打起來有板有眼。而為了便於理解,我們今天就用顏色代稱這些機器人選手。
打得像人、摔得更像人,這場機器人擂台賽有點東西
第一場:小黑 VS 小粉
首場登場的是小黑和小粉,正式展開較量。
雙方人類操作員唸完狠話,握手示意,接着一聲令下,兩台機器人瞬間啓動,開局互踹,戰意拉滿,但打着打着也有些「迷路」。
第一回合,小黑直接被幹翻在地,小粉見狀不但沒追擊,反手就是一套標準挑釁動作,屬實是殺人誅心。

第二回合,小粉繼續加強攻勢,小黑則顯得冷靜許多,試圖找機會趁機一腳帶走對手。雙方不斷試探彼此破綻,但局勢膠着,場面略顯焦灼。
第三回合,小黑一腳將小粉踢翻。但轉眼間,小黑自己也被絆倒,雙方雙雙倒地。幸運的是,小黑最終率先站起。
我宣佈「黑隊被 KO,本場比賽的結果是粉方獲勝。」
等等,不好意思,解説口誤,誤判小粉勝利,實際獲勝的是小黑。小插曲一波,後面解説也更正了這個比賽結果。
第二場:小綠 VS 小紅
第二組對決,輪到小綠對陣小紅。
第一回合期間,借鑑前面的比賽策略,開場雙方不再客氣,一上來就直接腿踢互相問候。只是這一回合,小綠操作失誤摔了個狗啃泥,直接被扣分。
進入第二回合,小綠徹底上頭,切換到狂暴模式,不僅對空氣打出一套組合拳,順帶還附送了一個挑釁動作,囂張值直接拉滿。
小紅見狀,表示孰可忍孰不可忍。

第三回合,小紅本打算反擊一波「教做人」,但第三回合剛起勢,一腳飛踢卻踢了個寂寞,直接原地躺平,比賽就此結束。
最終,小綠拿下這一局勝利。

決賽:小黑 VS 小綠(終極對決)
終於到了決賽時間,頂流對決:小黑對上小綠。
決賽開始前,官方還特地展示了它們的終極技能——颶風衝撞,不過比較可惜,這場比賽中並未上演這招,可能還需繼續打磨。
第一回合,雙方默契選擇膝踢開場,一上來就纏鬥成一團,裁判多次介入分開。小綠小綠雖摔了一次,但並未受太大影響。
第二回合節奏更快,小黑腿法密集、出招狠毒,小綠也不是吃素的,頻頻用拳還擊,但由於接連倒地兩次,整體情況不太樂觀。

來到終局之戰,第三回合。
小黑穩紮穩打,一記有力的側踢再次將小綠踢翻在地,而這已經是小綠在本場比賽中的第三次倒地,根據規則,勝負幾乎沒有懸念。
最終獲勝的,是小黑(AI 策算師)!
鏡頭拉近,小黑的機身佈滿擦痕和撞擊痕跡,也足以説明這場鏖戰的激烈程度,最後也讓我們把掌聲送給這位機器人選手。
打拳,是機器人上崗前的一場熱身
內行看門道,外行看熱鬧——這是這場機器人格鬥比賽中,解説重複最多的一句話。聽起來像是調侃,其實背後是門檻極高的技術考驗。
在拳擊場上,「站得住」是機器人最基本的尊嚴。
比起走路、跳舞,格鬥場景對結構穩定性和抗衝擊性提出了近乎嚴苛的要求,它不僅要求機體結構足夠剛硬、重心穩定,還要在短時間內完成高強度對抗動作。
一場像樣的機器人格鬥,要過四道關:
1. 機體設計:穩定性、抗打擊能力、動力系統等
2. 動作控制:步伐調整、手臂揮拳的準確度與連貫性
3. 感知系統:對環境變化(對手動作)的快速響應
4. 實時操控與延遲控制:目前仍靠人操作,意味着操作系統與人的配合也很關鍵
宇樹科技在接受媒體採訪時透露,他們為機器人格鬥動作採集了大量專業選手的數據,訓練素材直接來自職業搏擊選手的實戰演練。「它的老師就是一些職業的搏擊選手」
可以説,每一個揮拳的動作背後,都藏着職業選手的經驗數據。
這就不得不提一個認知誤區,我們早已習慣讓大模型寫代碼、畫畫、講笑話,於是理所當然地以為,機器人也應該能刷鍋、疊衣、喂貓。
但機器人不同於語言模型。語言模型可以從上萬億字的互聯網文本中自學成才,可對機器人來説,現實世界的數據收集成本是「級別不同」的事。
想教一個機器人炒雞蛋?你得先搭一個真實廚房,再裝一條能掄鍋鏟的機械臂,還要部署一套可以記錄每一次失敗的高精度數據系統——這一切,還得在經歷上千萬次失敗之後才可能接近合格。
相比之下,格鬥本質上是一種高效、低成本、強反饋的動作學習方式。
- 一拳一腳都有清晰的時間順序和姿態參數;
- 防禦、閃避、出擊的策略空間可控;
- 成功與否的判斷標準也極為明確(命中、躲避、倒地);
- 還可以通過動作捕捉,直接從職業搏擊選手身上獲取「標準答案」。
背後邏輯也很簡單。在人形機器人還沒找到明確落地場景之前,打拳是最容易標準化、最容易「出片」的展示方式。操作可控、畫面震撼、還能刷屏社交媒體——直給、好看、能講故事。
投資人看了興奮,媒體拍了好剪輯,觀眾一看就懂:這機器人,能打。
哪怕只是秀肌肉,只要能「出圈」,就是好演出,至少現在的打拳機器人,已經比前幾年那個連走路都磕磕絆絆的版本,強得不是一星半點。
當然話也要説回來,現在的機器人格鬥,背後還都是人操作的,很難不讓人質疑人形機器人目前仍是一款披着 AI 外衣的大號玩具。

從秀肌肉到上崗,機器人還得過很多關:穿越混亂場景、應對突發變化、進行人機協作、提升自我規劃能力……
真正的拐點,還需要落在炒菜、喂貓、養老、送貨、看護,這些瑣碎又高頻的場景裏。而現在的格鬥,只是機器人上崗前最有看點的一場熱身而已。
資料來源:愛範兒(ifanr)


請按此登錄後留言。未成為會員? 立即註冊